Professor Michael Peshkin
Breed Senior Professor in Design
Dept. of Mechanical Engineering
2133 Sheridan Road, Suite 3.345
Northwestern University
Evanston, Illinois 60208-3111 USA
847-491-4630 office
peshkin@northwestern.edu
| |
Professor Michael Peshkin Breed Senior Professor in Design Dept. of Mechanical Engineering 2133 Sheridan Road, Suite 3.345 Northwestern University Evanston, Illinois 60208-3111 USA 847-491-4630 office peshkin@northwestern.edu |
Tanvas
Founded 2010, to bring true haptic feedback to touchscreensKinea Design
Founded 2003, to develop robotic assistive devices for physical therapists
Acquired by HDT Global, 2011Cobotics
Founded 1997, to commercialize Cobots and related human-interactive robots
Acquired by Stanley Assembly Technologies, 2002Mako Surgical Corp. (formerly Z-KAT Inc.)
Founded 1995, to commercialize Coordinated Fluoroscopy for image guided surgery
Acquired by Stryker Corp., 2013
Northwestern University, Dept. of Mechanical Engineering
Mechanical Engineering, 1987 - presentCarnegie-Mellon University, Robotics Institute
PhD, Physics, December 1986Cornell University, Department of Physics
Master of Science, Experimental Solid State Physics, 1982University of Chicago
Bachelor of Arts with Honors, Physics, 1979
Research Technician, 1977-79, Supervisors: Henry J. Frisch, James Cronin
So Much Noise & No One Needs A Broadcast Message (36m podcast)
James Madison Center for Civic Engagement: Democracy Matters, June 2019Registering all new students to vote as a welcome to engagement (case study)
National Resource Consortium on Full Student Voter Participation, June 2019Students want to vote; colleges ought to help (opinion)
The Hill, Oct 25, 2018How one university teaches its students to vote, and it's old-school (opinion)
Washington Post, Sept 24, 2018Cracking the Puzzle of Bringing Out the Youth Vote (opinion)
Inside Higher Ed, July 23, 2018Colleges Take a Leap Into Voter Registration (news article)
New York Times, October 14, 2012Engaging college students in electoral politics (14m video)
Live from the Heartland, WLUW, July 21, 2012Are Long Lines the ‘New Poll Tax’? [reference data]
Michael Peshkin, In These Times, Nov. 25 2008Local and Absentee Voter Registration Drives on a College Campus
Kim Castle, Janice Levy, Michael Peshkin
CIRCLE Working Paper No. 66, October 2009
What if you could feel textures on your smartphone?
Crains Chicago Business, February 18, 2016Touch Technology (5m video)
Chicago Tonight, WTTW, April 17, 2012Touch Screens with Feeling
IEEE Spectrum, May 2009Better Together [News Release on this topic]
Observer, Association for Psychological Science, 19(5), May 2006Rehabilitation Medicine Welcomes a Robotic Revolution
Journal of the American Medical Association (JAMA) September 14, 2005, Vol 294, No. 10, p.1191Robotic Rehab
MIT Technology Review, Sept. 2005Works Well with Others: Collaborative Robots Interacting on the Assembly Line
Industrial Market Trends, Nov. 24, 2000Numerous reports about Cobots
1996 - 2000Fear of Science Fairs?
Michael A. Peshkin, Chicago Parent, Feb. 1997
System Dynamics
Michael A. Peshkin, L. Catherine Brinson
Online textbook, 2000Safety for Physical Human-Robot Interaction
Antonio Bicchi, Michael A. Peshkin, J. Edward Colgate
in Handbook of Robotics, Bruno Siciliano, Oussama Khatib (Eds.), 2008, ISBN 9783540239574Sensors and actuators
Kevin Lynch, Michael A. Peshkin
in The Mechatronics Handbook, Robert Bishop (ed.), CRC Press, 2002, ISBN 0849300665
also in Mechatronic Fundamentals and Modeling, Robert H Bishop (ed.), CRC Press, 2007, ISBN 0849392586T15.1 Draft Standard for Trial Use for Intelligent Assist Devices - Personnel Safety Requirements
Robotic Industries Association, March 15 2002Cobots
Michael A. Peshkin
in Frontiers of Engineering, National Academy of Engineering, NAE Press, 1998, ISBN 030906287XA Computer-Assisted Total Knee Replacement Surgical System Using a Calibrated Robot
Thomas C. Kienzle III, S. David Stulberg, Michael A. Peshkin, Arthur Quaid, Jon Lea, Ambarish Goswami, Chi-haur Wu
in Computer Assisted Surgery, edited by Russell H. Taylor, Stéphane Lavallée, Grigore S. Burdea, Ralph Mösges. MIT Press, 1995, ISBN 026220097XMental Transformations in Human-Robot Interaction
B.P. DeJong , J.E. Colgate, and M.A. Peshkin
in Mixed Reality and Human-Robot Interaction, Wang (Ed.). ISCA 47, pp. 35–511, ISBN 9400705816Robotic Manipulation Strategies (44MB)
Michael A. Peshkin (PhD dissertation)
Prentice-Hall, 1990, ISBN 0137814933
High-performance electroadhesive clutches with multilayered architecture.
Aksoy, Bekir, Sylvia Tan, Michael A. Peshkin, and J. Edward Colgate.
Science Advances 11, no. 7 (2025): eads0766The Single-Pitch Texel: A flexible and practical texture-rendering algorithm.
Burns, David A., Roberta L. Klatzky, Michael A. Peshkin, and J. Edward Colgate.
PNAS nexus 3, no. 1 (2024): p452Decoding roughness perception in distributed haptic devices.
Chatterjee, Sitangshu, Sylvia Tan, Changhyun Choi, Aditya Kuchibhotla, Guangchao Wan, Michael A. Peshkin, J. Edward Colgate, and M. Cynthia Hipwell
PNAS nexus 3, no. 10 (2024): p.468PixeLite: A Thin and Wearable High Bandwidth Electroadhesive Haptic Array
Sylvia Tan, Roberta L. Klatzky, Michael A. Peshkin, and J. Edward Colgate.
IEEE Transactions on Haptics. 2023 May 3A Low-Parameter Rendering Algorithm for Fine Textures.
Burns, David Arthur, Roberta L. Klatzky, Michael A. Peshkin, and Edward Colgate..
IEEE Transactions on Haptics 15, no. 1 (2022).Comparison of wide-band vibrotactile and friction modulation surface gratings.
Grigorii, Roman V., Evan Li, Michael A. Peshkin, and Edward Colgate.
IEEE Transactions on Haptics (2021).Building a navigable fine texture design space.
Friesen, Rebecca, Roberta L. Klatzky, Michael A. Peshkin, and Edward Colgate.
IEEE Transactions on Haptics (2021).Localizable button click rendering via active lateral force feedback.
Xu, Heng, Roberta L. Klatzky, Michael A. Peshkin, and J. Edward Colgate.
IEEE Transactions on Haptics 13, no. 3 (2020): 552-561How the Mechanical Properties and Thickness of Glass Affect TPaD Performance.
Heng Xu, Michael A. Peshkin, J. Edward Colgate
IEEE Transactions On Haptics, Vol. 13, No. 3, July-September 2020UltraShiver: Lateral Force Feedback on a Bare Fingertip via Ultrasonic Oscillation and Electroadhesion.
Heng Xu, Michael A. Peshkin, J. Edward Colgate
IEEE Transactions on Haptics 2019. doi: 10.1109/TOH.2019.2934853The Application of Tactile, Audible, and Ultrasonic Forces to Human Fingertips Using Broadband Electroadhesion
Craig D. Shultz, Michael Peshkin, and J. Edward Colgate
IEEE Transactions on Haptics ( Volume: 11 , Issue: 2 , April-June 1 2018 )eShiver: Lateral Force Feedback on Fingertips through Oscillatory Motion of an Electroadhesive Surface
Joseph Mullenbach, Michael Peshkin, J Edward Colgate
IEEE Trans Haptics (2016)Enhanced detection performance in electrosense through capacitive sensing
Yang Bai, Izaak D. Neveln, Michael Peshkin, and Malcolm A. MacIver
Bioinspiration & Biomimetics 11, no. 5 (2016): 055001Human-in-the-loop active electrosense
Sandra Fang, Michael Peshkin, Malcolm A MacIver
Bioinspiration & Biomimetics 11, no. 1 (2016)Finding and identifying simple objects underwater with active electrosense
Yang Bai, James B. Snyder, Michael Peshkin, and Malcolm A. MacIver
The International Journal of Robotics Research (2015): 0278364915569813.
Multiple Fingers-One Gestalt
Alexandra Lezkan, Steven Manuel, Edward Colgate, Roberta Klatzky, Michael Peshkin, and Knut Drewing
IEEE Trans Haptics. 2016 Apr-Jun;9(2):255-66. doi: 10.1109/TOH.2016.2524000Pressure and Draw-In Maps for Stamping Process Monitoring
Sah, S., Mahayotsanun, N., Peshkin, M., Cao, J., & Gao, R. X. (2016). Journal of Manufacturing Science and Engineering, 138(9), 091005.Coincidence avoidance principle in surface haptic interpretation
Steven G. Manuel, Roberta L. Klatzky, Michael A. Peshkin, and James Edward Colgate
Proceedings of the National Academy of Sciences 112, no. 8 (2015): 2605-2610Search Efficiency for Tactile Features Rendered by Surface Haptic Displays
John Ware, Elizabeth Cha, Michael Peshkin, J. Edward Colgate, and Roberta L. Klatzky
IEEE Transactions on Haptics 7, no. 4 (2014): 545-550
Inertia Compensation Control of a One-Degree-of-Freedom Exoskeleton for Lower-Limb Assistance: Initial Experiments
Gabriel Aguirre-Ollinger, J. Edward Colgate, Michael A. Peshkin and Ambarish Goswami
IEEE Transactions on Neural Systems and Rehabilitation Engineering, Vol. 20, No. 1, January 2012Development of a Mechatronic Platform and Validation of Methods for Estimating Ankle Stiffness During the Stance Phase of Walking
Elliott J. Rouse, Levi J. Hargrove, Eric J. Perreault, Michael A. Peshkin and Todd A. Kuiken
J Biomech Eng 135(8), 2013
Robotic touch shifts perception of embodiment to a prosthesis in targeted reinnervation amputees
Paul D. Marasco, Keehoon Kim, James Edward Colgate, Michael A. Peshkin, Todd A. Kuiken
Brain, Jan. 2011Development of a Model Osseo-Magnetic Link for Intuitive Rotational Control of Upper-Limb Prostheses
Elliott J. Rouse, David C. Nahlik, Michael A. Peshkin, Todd A. Kuiken
IEEE Transactions On Neural Systems And Rehabilitation Engineering, Vol. 19, No. 2, April 2011A Cyclic Robot for Lower Limb Exercise
Brian P DeJong, James Edward Colgate, Michael A. Peshkin
Journal of Medical Devices, Sept. 2011Preswing Knee Flexion Assistance Is Coupled With Hip Abduction in People With Stiff-Knee Gait After Stroke
James S. Sulzer, Keith E. Gordon, Yasin Y. Dhaher, Michael A. Peshkin, James L. Patton
Stroke, 41:1709. August 2010A 1-DOF Assistive Exoskeleton with Inertia Compensation: Effects on the Agility of Leg Swing Motion
Gabriel Aguirre-Ollinger, J. Edward Colgate, Michael A. Peshkin and Ambarish Goswami
Proceedings of the Institution of Mechanical Engineers, Part H: Journal of Engineering in Medicine March 1, 2011 vol. 225 no. 3 228-245ShiverPaD: A Glass Haptic Surface that Produces Shear Forces on a Bare Finger
Erik C. Chubb, J. Edward Colgate, and Michael A. Peshkin
IEEE Transactions on Haptics, VOL. 3, NO. 3, July-September 2010Design of an active one-degree-of-freedom lower-limb exoskeleton with inertia compensation
Gabriel Aguirre-Ollinger, J Edward Colgate, Michael A Peshkin, Ambarish Goswami
International Journal of Robotics Research, Dec. 2010, DOI: 10.1177/0278364910385730On the Design of Miniature Haptic Devices for Upper Extremity Prosthetics
Keehoon Kim, James Edward Colgate, Julio J. Santos-Munne, Alexander Makhlin, and Michael A. Peshkin
IEEE/ASME Transactions on Mechatronics, 2009Using Kinesthetic and Tactile Cues to Maintain Exercise Intensity
Aaron R. Ferber, Michael Peshkin, Member, IEEE, and J. Edward Colgate, Member, IEEE
IEEE Transactions on Haptics, 2009Tooling-Integrated Sensing Systems for Stamping Process Monitoring
Numpon Mahayotsanun, Sripati Sah, Jian Cao, Michael Peshkin, Robert X. Gao, and Chuan-tao Wang
International Journal of Machine Tools and Manufacture, 2009Pulling your strings: Cable Moment Arm Manipulation as a Modality of Joint Actuation
James Sulzer, Michael Peshkin, James Patton
IEEE Robotics & Automation Magazine, 15(3), Sept. 2008Physical Collaboration of Human-Human and Human-Robot Teams
Kyle B. Reed, Michael Peshkin
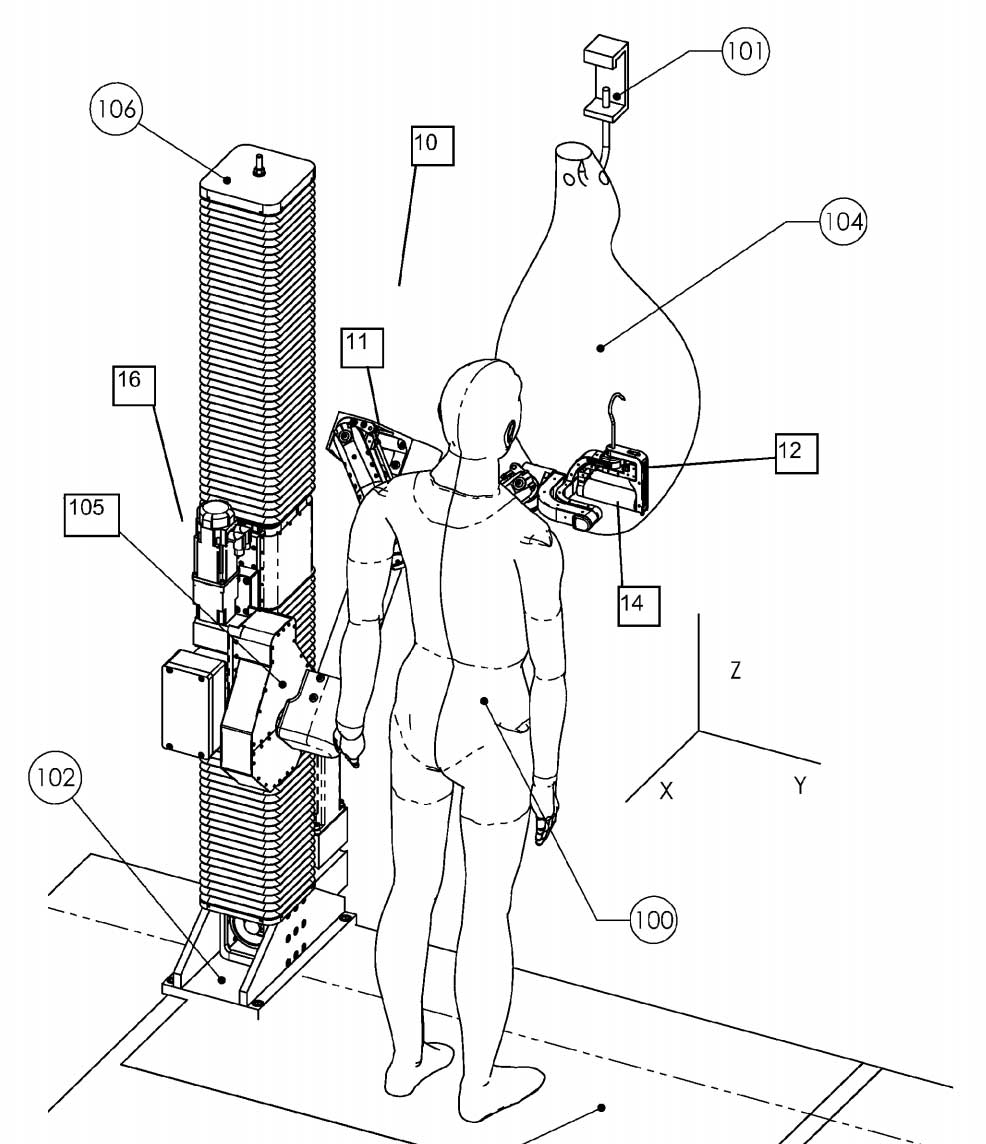
IEEE Transactions on Haptics, 1(2), Dec. 2008KineAssist: Design and Development of a Robotic Overground Gait and Balance Therapy Device
James Patton, David A. Brown, Michael Peshkin, JulioJ. Santos-Munne, Alex Makhlin, Ela lewis, J. Edward Colgate, and Doug Schwandt
Topics in Stroke Rehabilitation 15(2):131-139 (2008)Causes of Microslip in a Continuously Variable Transmission
Songho Kim, Carl Moore, Michael Peshkin, J. Edward Colgate
Journal of Mechanical Design 130, January 2008Power Efficiency of the Rotational-to-Linear Infinitely Variable Cobotic Transmission
Eric L. Faulring, J. Edward Colgate, and Michael A. Peshkin
ASME J. Mechanical Design, December 2007The Cobotic Hand Controller: Design, Control and Performance of a Novel Haptic Display
Eric L. Faulring, J. Edward Colgate, Michael A. Peshkin
The International Journal of Robotics Research, Vol. 25, No. 11, November 2006, pp. 1099-1119Haptic display of constrained dynamic systems via admittance displays
Eric L. Faulring, Kevin M. Lynch, J. Edward Colgate, Michael A. Peshkin
Accepted for publication, IEEE Transactions on Robotics, 2007Haptically Linked Dyads: Are Two Motor-Control Systems Better Than One?
Kyle Reed, Michael A. Peshkin, Mitra J. Hartmann, Marcia Grabowecky, James Patton, and Peter M.Vishton
Psychological Science, 17(5), p.365-366, May 2006
Lessons Learned from a Novel Teleoperation Testbed
Brian P. DeJong, Eric L. Faulring, J. Edward Colgate, Michael A. Peshkin, Hyosig Kang, Young S. Park, Thomas F. Ewing
Industrial Robot 33(3), p.187, 2006Controlling the Apparent Inertia of Passive Human-Interactive Robots
Tom Worsnopp, Michael A. Peshkin, Kevin Lynch, J. Edward Colgate
Journal of Dynamic Systems Measurement and Control, 128 (1), March 2006Static Single-Arm Force Generation With Kinematic Constraints
Peng Pan, Michael A. Peshkin, J. Edward Colgate, Kevin M. Lynch,
J Neurophysiol 93: p.2752-2765, 2005Motion Guides for Assisted Manipulation
Kevin M. Lynch, Caizhen Liu, Allan Sorensen, Songho Kim, Michael A. Peshkin, Ed Colgate, Tanya Tickel, David Hannon, Kerry Shiels
International Journal of Robotics Research, 21(1), p.27-43, January 2002Cobot Implementation of Virtual Paths and 3D Virtual Surfaces
Carl Moore, Michael A. Peshkin, J. Edward Colgate
IEEE Transactions on Robotics and Automation, 19(2), p.347-351, April 2003Cobot architecture
Michael A. Peshkin, J. Edward Colgate, Witaya Wannasuphoprasit, Carl Moore, Brent Gillespie
IEEE Transactions on Robotics and Automation, 17(4), p.377, August 2001A general framework for cobot control
Gillespie, R.B.; Colgate, J.E.; Peshkin, M.A.
Robotics and Automation, IEEE Transactions on , 17(4) , p.391, August 2001Kinematic Creep in a Continuously Variable Transmission: Traction Drive Mechanics for Cobots
R. Brent Gillespie, Carl A. Moore, Michael A. Peshkin, and J. Edward Colgate
ASME J. Mechanical Design 124(4), p.713, December 2002Mechanics in the Engineering First Curriculum at Northwestern University
Belytschko, T., A. Bayliss, C. Brinson, S. Carr, W. Kath, S. Krishnaswamy, B. Moran, J. Nocedal, M. Peshkin
International Journal of Engineering Education, Vol. 13(6), p.457-472, (1998)Mechanically implementable accommodation matrices for passive force control
Ambarish Goswami, Michael A. Peshkin
International Journal of Robotics Research, 18(8), August 1999Final report of the Technical Requirements for Image-Guided Spine Procedures Workshop
Kevin Cleary et. al., Computer Aided Surgery, 5(3), 2000
Cobots (invited)
Michael A. Peshkin, J. Edward Colgate
Industrial Robot, 26(5), 1999, pp 335-341Guiding systems for computer assisted surgery: introducing synergistic devices
J. Troccaz, Michael A. Peshkin, B. L. Davies
Medical Image Analysis 2(2), 1998Long-range geometrical correlations in two-dimensional foams
B Dubertret, N Rivier, and Michael A. Peshkin
J. Phys. A: Math. Gen. 31 (1998) p.879–900A Complete Algorithm for Designing Passive Fences to Orient Parts
Jeff Wiegley, Ken Goldberg, Michael A. Peshkin, Mike Brokowski
Assembly Automation; 17:2 1997; pp. 129-136; ISSN: 0144-5154Impedance restrictions on independent finger grippers
Mike Brokowski, Michael A. Peshkin
IEEE Transactions on Robotics and Automation 13 (4) August 1997, pp 617-622Registration and immobilization in robot-assisted surgery
Jon T. Lea, Dane Watkins, Aaron Mills, Michael A. Peshkin, Thomas C. Kienzle III, S. David Stulberg
Journal of Image Guided Surgery 1 (2), pp. 80-87, 1995Diagramming Registration Connectivity and Structure
Jon T. Lea, Julio J. Santos-Munné, Michael A. Peshkin
Engineering in Medicine and Biology 14 (3), May 1995, pp 271-278A Computer-Assisted Total Knee Replacement Surgical System Using a Calibrated Robot (invited)
Thomas C. Kienzle III, S. David Stulberg, Michael A. Peshkin, Arthur Quaid, Jon Lea, Ambarish Goswami, Chi-haur Wu
Engineering in Medicine and Biology 14 (3), May 1995, pp 301-306Optimal curved fences for part alignment on a belt
Mike Brokowski, Michael A. Peshkin, Ken Goldberg
ASME Journal of Mechanical Design, 117 (1), March 1995 (p. 27)Complete parameter identification of a robot from partial pose information (invited)
Ambarish Goswami, Arthur Quaid, Michael A. Peshkin
Control Systems 13 (5), October 1993 (special issue)Force-Assembly with Friction
Joseph M. Schimmels, Michael A. Peshkin
IEEE Transactions on Robotics and Automation 10 (4), August 1994, pp 465-479Phase transitions in dilute, locally connected neural networks
Katherine J. Strandburg, Michael A. Peshkin, Daniel F. Boyd, Christopher Chambers, Brennan O'Keefe
Physical Review A, 45(8) 6135-6138, 1992Admittance matrix design for force-guided assembly
Joseph M. Schimmels, Michael A. Peshkin
IEEE Transactions on Robotics and Automation 8(2) April 1992, 213-227Entropic predictions for cellular networks
Michael A. Peshkin, Katherine J. Strandburg, Nicolas Rivier
Physical Review Letters 67 (13) 1803 , Sept. 23, 1991Programmed compliance for error-corrective assembly
Michael A. Peshkin
IEEE Transactions on Robotics and Automation 6:4 (August 1990)Minimization of energy in quasistatic manipulation
Michael A. Peshkin and A. C. Sanderson
IEEE Transactions on Robotics and Automation 5:1 (February 1989)Planning robotic manipulation strategies for workpieces that slide
Michael A. Peshkin and A. C. Sanderson
IEEE Transactions on Robotics and Automation 4:5 (October 1988)Task planning for robotic manipulation in space applications
A. C. Sanderson, Michael A. Peshkin, L. S. Homem-de-Mello
IEEE Transactions on Aerospace and Electronic Systems 24:5 (1988)The motion of a pushed, sliding workpiece
Michael A. Peshkin and A. C. Sanderson
IEEE Transactions on Robotics and Automation 4:6 (December 1988)Reachable grasps on a polygon: the convex rope algorithm
Michael A. Peshkin and A. C. Sanderson
IEEE Transactions on Robotics and Automation 2:1 (1986)Integrator for magnetic field measurement
Michael A. Peshkin
Review of Scientific Instruments, July 1981
NURing: A Tendon-Driven Wearable Ring for On-Demand Kinesthetic Haptic Feedback.
Trzpit, Tomasz P, Gregory Reardon, Anthony Shilati, Elizabeth M Gerber, Michael A. Peshkin, and J. Edward Colgate.
2025 IEEE World Haptics Conference (WHC), pp. 255-266. IEEE, 2025A Device for Implementing Kinesthetic Fingertip Guidance and Constraint on Planar Surfaces
Tomasz Trzpit, Michael Peshkin, J. Edward Colgate
IEEE World Haptics Conference (WHC), 2023A Soft Wearable Tactile Device Using Lateral Skin Stretch
Tan, Sylvia, R. Daelan Roosa, Roberta L. Klatzky, Michael A. Peshkin, and J. Edward Colgate.
IEEE World Haptics Conference (WHC), pp. 697-702. IEEE, 2021Spatial perception of textures depends on length-scale.
Burns, David Arthur, Roberta L. Klatzky, Michael A. Peshkin, and J. Edward Colgate.
IEEE World Haptics Conference (WHC), pp. 415-420. IEEE, 2021SwitchPaD: Active Lateral Force Feedback over a Large Area Based on Switching Resonant Modes.
Xu, Heng, Michael A. Peshkin, and J. Edward Colgate
International Conference on Human Haptic Sensing and Touch Enabled Computer Applications, pp. 217-225. Springer, Cham, 2020Localized rendering of button click sensation via active lateral force feedback.
Xu, Heng, Roberta L. Klatzky, Michael A. Peshkin, and J. Edward Colgate.
2019 IEEE World Haptics Conference (WHC), pp. 509-514. IEEE, 2019.Localized Rendering of Button Click Sensation via Active Lateral Force Feedback.
Heng Xu, Roberta L. Klatzky, Michael A. Peshkin, and J. Edward Colgate
2019 IEEE World Haptics Conference (WHC), Tokyo, Japan, 9-12 July 2019Stiction rendering in touch.
Roman V. Grigorii, Michael A. Peshkin, J. Edward Colgate
2019 IEEE World Haptics Conference (WHC), Tokyo, Japan, 9-12 July 2019Single pitch perception of multi-frequency textures.
Rebecca Fenton Friesen, Roberta L. Klatzky, Michael A. Peshkin, and J. Edward Colgate
Haptics Symposium (HAPTICS), 2018 IEEE, pp. 290-295. IEEE, 2018.UltraShiver: Lateral force feedback on a bare fingertip via ultrasonic oscillation and electroadhesion
Heng Xu, Michael A. Peshkin, and J. Edward Colgate
Haptics Symposium (HAPTICS), 2018 IEEE, pp. 198-203. IEEE, 2018.On the Electrical Characterization of Electroadhesive Displays and the Prominent Interfacial Gap Impedance Associated with Sliding Fingertips
Craig D. Shultz, Michael A. Peshkin, and J. Edward Colgate.
2018 IEEE Haptics Symposium (HAPTICS), pp. 151-157. IEEE, 2018.The Contribution of Air to Ultrasonic Friction Reduction
Rebecca Fenton Friesen, Michael Wiertlewski, Michael Peshkin, and J. Edward Colgate
2017 IEEE World Haptics Conference (WHC), Furstenfeldbruck (Munich), Germany, June 2017The Application of Tactile, Audible, and Ultrasonic Forces to Human Fingertips Using Broadband Electroadhesion
Craig D. Shultz, Michael Peshkin, and J. Edward Colgate
2017 IEEE World Haptics Conference (WHC), Furstenfeldbruck (Munich), Germany, June 2017High-bandwidth tribometry as a means of recording natural textures
Roman V. Grigorii, Michael Peshkin, J. Edward Colgate
2017 IEEE World Haptics Conference (WHC), Furstenfeldbruck (Munich), Germany, June 2017Tactile Paintbrush: A Procedural Method for Generating Spatial Haptic Texture
David J. Meyer, Michael A. Peshkin, and J. Edward Colgate
2016 IEEE Haptics Symposium, April 8-11, PhiladelphiaViscous Textures: Velocity Dependence in Fingertip-Surface Scanning Interaction
Daniel J. Brewer, David J. Meyer, Michael A. Peshkin, and J. Edward Colgate
2016 IEEE Haptics Symposium, April 8-11, PhiladelphiaeShiver: Force Feedback on Fingertips through Oscillatory Motion of an Electroadhesive Surface
Joe Mullenbach, Michael A. Peshkin, and J. Edward Colgate
2016 IEEE Haptics Symposium, April 8-11, PhiladelphiaModeling and Synthesis of Tactile Texture with Spatial Spectrograms for Display on Variable Friction Surfaces
David J. Meyer, Michael A. Peshkin, and J. Edward Colgate
2015 IEEE World Haptics Conference, June 22–26, 2015. Evanston, Il, USABioinspired artificial fingertips that exhibit friction reduction when subjected to transverse ultrasonic vibrations
Rebecca Fenton Friesen, Michael Wiertlewski, Michael A. Peshkin and J. Edward Colgate
2015 IEEE World Haptics Conference, June 22–26, 2015. Evanston, Il, USASurface Haptics via Electroadhesion: Expanding Electrovibration with Johnsen and Rahbek
Craig D. Shultz, Michael A. Peshkin, J. Edward Colgate
2015 IEEE World Haptics Conference, June 22–26, 2015. Evanston, Il, USADynamics of Ultrasonic and Electrostatic Friction Modulation for Rendering Texture on Haptic Surfaces
David J. Meyer, Michael Wiertlewski, Michael A. Peshkin, J. Edward Colgate
IEEE Haptics Symposium 2014, 23-26 February, Houston TX, USAFingertip friction modulation due to electrostatic attraction
Meyer, David J.; Peshkin, Michael A.; Colgate, J.Edward
World Haptics Conference (WHC), 2013 , vol., no., pp.43,48, 14-17 April 2013Surface Haptic Interactions with a TPad Tablet
Joe Mullenbach, Craig Shultz, Anne Marie Piper, Michael Peshkin, J. Edward Colgate
UIST’13, October 8–11, 2013, St. Andrews, UK3Perceptual Collapse: The Fusion of Spatially Distinct Tactile Cues Into a Single Percept
Steven G. Manuel, J. Edward Colgate, Michael A. Peshkin, Roberta L. Klatzky
World Haptics Conference (WHC), 2013 , vol., no., pp.1,6, 14-17 April 2013High-fidelity texture display via programmable friction
Meyer, D.J. ; Wiertlewski, M. ; Leonardis, D. ; Peshkin, M.A. ; Colgate, J.E.
Haptics Symposium (HAPTICS), 2014 IEEEEnhancing Physicality in Touch Interaction with Programmable Friction
Vincent Lévesque, Louise Oram, Karon MacLean, Andy Cockburn, Nicholas D. Marchuk, Dan Johnson, J. Edward Colgate, Michael A. Peshkin
CHI '11 Proceedings of the 2011 annual conference on Human factors in computing systems, NYDesign and Validation of a Platform Robot for Determination of Ankle Impedance During Ambulation
Elliott J. Rouse, Levi J. Hargrove, Michael A. Peshkin, Todd A. Kuiken
33rd Annual International Conference of the IEEE EMBS Boston, Massachusetts USA, August 30 - September 3, 2011Frictional Widgets: Enhancing Touch Interfaces with Programmable Friction
Vincent Lévesque, Louise Oram, Karon MacLean, Andy Cockburn, Nicholas D. Marchuk, Dan Johnson, J. Edward Colgate, Michael A. Peshkin
CHI '11 Proceedings of the 2011 annual conference on Human factors in computing systems, NYFriction measurements on a Large Area TPaD
Marchuk, N.D.; Colgate, J.E.; Peshkin, M.A.
Haptics Symposium, 2010 IEEE, pp.317-320, 25-26 March 2010ShiverPad: A Device Capable of Controlling Shear Force on a Bare Finger
Erik C. Chubb, J. Edward Colgate, Michael A. Peshkin
Third Joint Eurohaptics Conference and Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems Salt Lake City, UT, USA, March 18-20, 2009ActivePaD Surface Haptic Device
Joe Mullenbach, Dan Johnson, J. Edward Colgate, Michael A. Peshkin
Haptics Symposium 2012, 4-7 March 2012, Vancouver, BC, CanadaRestoring Physicality to Touch Interaction with Programmable Friction
Vincent Lévesque, Louise Oram, Karon MacLean, J. Edward Colgate, Michael A. PeshkinErik C. Chubb, J. Edward Colgate, Michael A. Peshkin
2011 IEEE International Conference on Consumer Electronics (ICCE)LateralPaD: A Surface-Haptic Device That Produces Lateral Forces on A Bare Finger
Xiaowei Dai, J. Edward Colgate, Michael A. Peshkin
Haptics Symposium 2012, 4-7 March 2012, Vancouver, BC, CanadaSurface Haptic Feature Attenuation due to Contact on Opposing Surface
Steven G. Manuel, Roberta L. Klatzky, J. Edward Colgate, Michael A. Peshkin
Haptics Symposium 2012, 4-7 March 2012, Vancouver, BC, CanadaPsychophysical evaluation of a variable friction tactile interface
Evren Samur, J. Edward Colgate, Michael Peshkin
Proc. SPIE, Vol. 7240, Haptics, January 2009Adaptation to knee flexion torque during gait
Sulzer, J.S., Gordon, K.E., Hornby, T.G., Peshkin, M.A., Patton, J.L.
Rehabilitation Robotics, ICORR 2009Control of prosthetic arm rotation by sensing rotation of residual arm bone
Guanglin Li, Elliott Rouse, David Nahlik, Michael Peshkin, and Todd A. Kuiken
MyoElectric Controls Conference, MEC ’08, Fredericton, NB, August 10-15, 2008Measuring and Increasing Z-Width with Active Electrical Damping
David W. Weir, J. Edward Colgate, Michael Peshkin
Symposium on Haptic Interfaces for Virtual Environments and Teleoperator Systems 2008On the Design of a Thermal Display for Upper Extremity Prosthetics
Keehoon Kim, J. Edward Colgate, Michael Peshkin
Symposium on Haptic Interfaces for Virtual Environments and Teleoperator Systems 2008T-PaD: Tactile Pattern Display through Variable Friction Reduction
Laura Winfield, John Glassmire, J. Edward Colgate, Michael Peshkin
Proc. 2nd Joint Eurohaptics Conf. and Symp. on Haptic Interfaces for Virtual Environment and Teleoperator Systems (WHC 2007, IEEEVR2007), Tsukuba, Japan, IEEE Press.A 1-DOF Assistive Exoskeleton with Virtual Negative Damping: Effects on the Kinematic Response of the Lower Limbs
Gabriel Aguirre-Ollinger, J. Edward Colgate, Michael A. Peshkin and Ambarish Goswami
2007 IEEE/RSJ International Conference on Intelligent Robots and Systems San Diego, CA, USA, Oct 29 - Nov 2, 2007An Actuated Finger Exoskeleton for Hand Rehabilitation Following Stroke
T.T. Worsnopp, M.A. Peshkin, J.E. Colgate, and D.G. Kamper
2007 IEEE 10th International Conference on Rehabilitation Robotics, June 12-15, NoordwijkActive-Impedance Control of a Lower-Limb Assistive Exoskeleton
Gabriel Aguirre-Ollinger, J. Edward Colgate, Michael A. Peshkin and Ambarish Goswami
2007 IEEE 10th International Conference on Rehabilitation Robotics, June 12-15, NoordwijkDesign of a Mobile, Inexpensive Device for Upper Extremity Rehabilitation at Home
James S. Sulzer, Michael A. Peshkin and James L. Patton
2007 IEEE 10th International Conference on Rehabilitation Robotics, June 12-15, NoordwijkMotility Evaluation of a Novel Overground Functional Mobility Tool for Post Stroke Rehabilitation
J. L. Patton, D. Brown, E. Lewis, G., Crombie, , J. Santos, A. Makhlin, J. E. Colgate, M. Peshkin
2007 IEEE 10th International Conference on Rehabilitation Robotics, June 12-15, NoordwijkUsing Haptic Communications with the Leg to Maintain Exercise Intensity
Aaron Ferber, Michael A. Peshkin, J. Edward Colgate
IEEE RO-MAN 2007, August 26-29, KoreaIntegrated Sensing System for Stamping Monitoring Control
Numpon Mahayotsanun, Jian Cao, Michael Peshkin, C.T. Wang, Sripati Sah, Robert Gao
IEEE SENSORS 2007 ConferenceReplicating Human-Human Physical Interaction
KB Reed, J Patton, Michael A. Peshkin
Robotics and Automation, 2007 IEEE International ConferenceT-PaD: Tactile Pattern Display through Variable Friction Reduction
L Winfield, J Glassmire, J. Edward Colgate, Michael A. Peshkin
Second Joint EuroHaptics Conference and Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems (WHC'07) pp. 421-426Cobotic Architecture for Prosthetics
Eric L. Faulring, J. Edward Colgate, Michael A. Peshkin
28th IEEE EMBS Annual International Conference, September 2006Control and performance of the rotational-to-linear cobotic transmission
Eric L. Faulring, J. Edward Colgate, Michael A. Peshkin
IEEE 14th Symp. on Haptic Interfaces for Virtual Environments and Teleoperator Systems, 2006Remote Manipulation of D&D Exhibiting Tele-Autonomy and Tele-Collaboration
TF Ewing, J. Edward Colgate, YS Park, Michael A. Peshkin, B DeJong, E Faulring, H Kang
DOE/ER/63288, December 5, 2006Catastrophe and Stability Analysis of a Cable-Driven Actuator
JS Sulzer, Michael A. Peshkin, JL Patton
Engineering in Medicine and Biology Society, 2006. EMBS'06.Semi-autonomous Telerobotic Manipulation: A Viable Approach for Space Structure Deployment and Maintenance
Young S. Park, Hyosig Kang,Thomas F. Ewing, Eric L. Faulring,Brian P. DeJong, Michael A. Peshkin, J. Edward Colgate
AIP Conference Proceedings -- February 6, 2005 -- Volume 746, Issue 1, pp. 1129-1136, 2005Design and Performance of a High Fidelity, Low Mass, Linear Haptic Display
David W. Weir, Michael A. Peshkin, J. Edward Colgate, Pietro Buttolo
First Joint Eurohaptics Conference and Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems (WHC'05) pp. 177-182, 2005A Draw-In Sensor for Process Control and Optimization
Numpon Mahayotsanun, Jian Cao, and Michael Peshkin
NUMISHEET 2005: AIP Conference Proceedings -- August 5, 2005 -- Volume 778, pp. 861-866Increasing the Impedance Range of a Haptic Display by Adding Electrical Damping
Joshua S. Mehling, J. Edward Colgate, Michael A. Peshkin,
First Joint Eurohaptics Conference and Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems (WHC'05), 2005Haptic Interaction With Constrained Dynamic Systems
Eric L. Faulring, Kevin M. Lynch, J. Edward Colgate, Michael A. Peshkin,
Proc. International Conference on Robotics and Automation, Barcelona, 2005MARIONET: An Exotendon-Driven Rotary Series Elastic Actuator for Exerting Joint Torque
James Sulzer; Michael A. Peshkin; James L. Patton
IEEE 9th International Conference on Rehabilitation Robotics, June 28, 2005Real time stiffness display interface device for perception of virtual soft object
A Song, D Morris, J. Edward Colgate, Michael A. Peshkin
Intelligent Robots and Systems, 2005.(IROS 2005).High Performance Cobotics
Eric Faulring.; J. Edward Colgate; Michael A. Peshkin
IEEE 9th International Conference on Rehabilitation Robotics, June 28, 2005KineAssist: A Robotic Overground Gait and Balance Training Device
Michael A. Peshkin, David Brown, Julio Santos-Munne, Alex Makhlin, David Brown, J. Edward Colgate, James L. Patton, Douglas Schwandt
IEEE 9th International Conference on Rehabilitation Robotics, June 28, 2005Human Interaction with Passive Assistive Robots
Peng Pan, Kevin Lynch, Michael A. Peshkin
IEEE 9th International Conference on Rehabilitation Robotics, June 28, 2005Kinesthetic Interaction
Kyle Reed, Michael A. Peshkin, Mitra Hartmann, J. Edward Colgate; James L. Patton
IEEE 9th International Conference on Rehabilitation Robotics, June 28, 2005, 2005Multifunctional Whisker Arrays for Distance Detection, Terrain Mapping, and Object Feature Extraction
Aimee E. Schultz, Joseph H. Solomon, Michael A. Peshkin, Mitra J. Hartmann
IEEE International Conference on Robotics and Automation, 2005Switch Characterization and the Haptic Profile
David Weir, Pietro Buttolo, Michael A. Peshkin, J. Edward Colgate, James Rankin, Matthew Johnston
12th Haptic Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems, March 27-28, 2004, ChicagoA High Performance 6-DOF Haptic Cobot (Best Student Paper award)
Eric L. Faulring, J. Edward Colgate and Michael A. Peshkin
IEEE International Conference on Robotics and Automation 2004Enhanced Teleoperation for D&D
Young S. Park, Hyosig Kang, Thomas F. Ewing, Eric L.Faulring, J. Edward Colgate, Michael A. Peshkin
IEEE International Conference on Robotics and Automation 2004Semi-automatic Teleoperation for D&D
Young S. Park, Hyosig Kang, Thomas F. Ewing, J. Edward Colgate, Michael A. Peshkin, Eric L. Faulring
10th Robotics & Remote Systems Mtg. Proceedings, Gainesville, Florida, 2004Initial Studies in Human-Robot-Human Interaction: Fitts’ Law for Two People
Kyle Reed, Michael A. Peshkin, J. Edward Colgate, James Patton
IEEE International Conference on Robotics and Automation 2004Static Single-Arm Force Generation with Kinematic Constraints
Peng Pan, Kevin M. Lynch, Michael A. Peshkin, J. Edward Colgate
IEEE International Conference on Robotics and Automation 2004Improving Teleoperation: Reducing Mental Rotations and Translations
Brian P. DeJong, J. Edward Colgate, Michael A. Peshkin
IEEE International Conference on Robotics and Automation 2004Controlling the Apparent Inertia of Passive Human- Interactive Robots
Tom Worsnopp, Michael A. Peshkin, J. Edward Colgate, Kevin Lynch
IEEE International Conference on Robotics and Automation 2004Toward Improved CVTs: Theoretical and Experimental Results
M. Brokowski, S. Kim, J.E. Colgate, B. Gillespie, Michael A. Peshkin
Proceedings of IMECE 2002 (IMECE2002-DSC-33680)Intelligent Assist Devices in Industrial Applications: A Review
J. Edward Colgate, Michael A. Peshkin, Stephen H. Klostermeyer
Intelligent Robots and Systems (IROS) 2003Kinematic constraints for assisted single-arm manipulation
T. Tickel, D. Hannon, K. M. Lynch, Michael A. Peshkin, and J. E. Colgate
IEEE International Conference on Robotics and Automation 2002Experiments in Ergonomic Robot-Guided Manipulation
A. Sorensen, C. Liu, S. M. Kim, K. M. Lynch, Michael A. Peshkin
Intelligent Robots and Systems (IROS) 2000, Takamatsu Japan, Nov 2000Surgical Instrumentation, Tooling, and Robotics
Michael A. Peshkin, Workshop Technical Leader
in Technical Requirements for Image-Guided Spine Procedures, Georgetown University Medical Center, 17-20 April 1999 (Kevin Cleary, ed.)A Controller For Simulating Freedom Of Motion For A Cobot
Carl A. Moore, Michael A. Peshkin, J. Edward Colgate
Proceedings of the 7th Mechatronics Forum International Conference, Atlanta GA, 6-8 September 2000 (Pergamon Press)A Three Revolute Cobot Using CVTs in Parallel
Carl A. Moore, Michael A. Peshkin, J. Edward Colgate
Proceedings of IMECE 1999Registration graphs: a diagramming and analysis tool for registration in computer-assisted surgery
Jon Lea and Michael A. Peshkin
13th International Congress on Computer Assisted Radiology and Surgery (CARS '99), ed. H. Lemke, Paris, 23-26 June 1999Cobotic assists
M. Peshkin, J. E.Colgate, W. Wannasuphoprasit
in Intelligent Assist Devices: A new generation of ergonomic tools (workshop)
1999 International Conference on Robotics and Automation. Detroit MI.Cobots: A Novel Material Handling Technology (ASME MHED Best Paper award)
W. Wannasuphoprasit, P. Akella, M. Peshkin, J. E.Colgate
Proceedings of IMECE 1998A General Framework for Cobot Control
R. Brent Gillespie, J. Edward Colgate, Michael A. Peshkin
1999 International Conference on Robotics and Automation. Detroit MI.Design of a 3R Cobot Using Continuously Variable Transmissions
Carl A. Moore, Michael A. Peshkin, J. Edward Colgate
1999 International Conference on Robotics and Automation. Detroit MI.Cobots for the automobile assembly line
Prasad Akella, Michael A. Peshkin, Ed Colgate, Wit Wannasuphoprasit, Nidamaluri Nagesh, Jim Wells, Steve Holland, Tom Pearson, Brian Peacock
1999 International Conference on Robotics and Automation. Detroit MI.Force Sensors for Human/Robot Interaction
Andy Lorenz, Michael A. Peshkin, J. Edward Colgate
1999 International Conference on Robotics and Automation. Detroit MI.The use of localizers, robots and synergistic devices in computer assisted surgery
Jocelyne Troccaz, Michael A. Peshkin, Brian Davies
CVRMed/MRCAS, Grenoble, March 1997Cobot Control
Witaya Wannasuphoprasit, Brent Gillespie, J. Edward Colgate, Michael A. Peshkin
1997 International Conference on Robotics and Automation. Albuquerque, NMCobots: Robots for Collaboration with Human Operators
J. Edward Colgate, Witaya Wannasuphoprasit, Michael A. Peshkin
Proceedings of the International Mechanical Engineering Congress and Exhibition, Atlanta, GA, DSC-Vol. 58, pp. 433-39Passive Robots and Haptic Displays based on Nonholonomic Elements
Michael A. Peshkin, James E. Colgate, Carl Moore
Proceedings of the IEEE 1996 International Conference on Robotics and Automation, PhiladelphiaNonholonomic Haptic Display (IEEE ICRA Best Conference Paper award)
James E. Colgate, Michael A. Peshkin, Witaya Wannasuphoprasit
Proceedings of the IEEE 1996 International Conference on Robotics and Automation, PhiladelphiaA Complete Algorithm for Designing Passive Fences to Orient Parts
Jeff Wiegley, Ken Goldberg, Michael A. Peshkin, Mike Brokowski
Proceedings of the IEEE 1996 International Conference on Robotics and Automation, PhiladelphiaDiagramming Registration Connectivity and Structure
Jon T. Lea, Julio J. Santos-Munné, Michael A. Peshkin
Proceedings of Medicine Meets Virtual Reality III, January 1995, San Diego
Interactive Technology and the New Paradigm for Healthcare, p. 191-200 R. M. Satava et al., eds.
Technology and Informatics vol. 18, IOS Press 1995A Stereotactic/Robotic System for Pedicle Screw Placement
Julio J. Santos-Munné, Michael A. Peshkin, Srdjan Mirkovic, David Stulberg, Thomas C. Kienzle III
Proceedings of Medicine Meets Virtual Reality III, January 1995, San Diego
Interactive Technology and the New Paradigm for Healthcare, p. 326-333 R. M. Satava et al., eds.
Technology and Informatics vol. 18, IOS Press 1995Quantitative Evaluation of Neural Networks for NDE Applications Using the ROC Curve
Mackay A.E Okure and Michael A. Peshkin
21st Annual Review of Progress in Quantitative Nondestructive Evaluation, Snowmass CO, 1994Registration and Immobilization for Robot-Assisted Orthopaedic Surgery
Jon T. Lea, Dane Watkins, Aaron Mills, Michael A. Peshkin, Thomas C. Kienzle III, S. David Stulberg
First International Symposium on Medical Robotics and Computer Assisted Surgery, Pittsburgh, PA, 1994ROC Evaluation of Neural Networks for Aircraft Wheel NDE
Mackay A.E Okure and Michael A. Peshkin.
1994 ASNT Spring Conference and Third Annual Symposium, March 21-25, 1994 New Orleans, LA
Paper Summaries. The American Society for Nondestructive Testing, Columbus, OH: 232-234.Force Guided Assembly (invited)
Michael A. Peshkin, Ambarish Goswami, Joe Schimmels
Proceedings of the 31st Allerton Conference on Communication, Control, and Computing, Champaign IL, 1993The space of admittance control laws that guarantee force-assembly with friction
Joseph M. Schimmels, Michael A. Peshkin
Proceedings of the IEEE 1993 International Conference on Robotics and Automation, Atlanta, GATask-space / joint-space damping transformations for passive redundant manipulators (invited)
Ambarish Goswami, Michael A. Peshkin
Proceedings of the IEEE 1993 International Conference on Robotics and Automation, Atlanta, GAMechanical computation for passive force control
Ambarish Goswami, Michael A. Peshkin
Proceedings of the IEEE 1993 International Conference on Robotics and Automation, Atlanta, GACurved fences for part alignment
Mike Brokowski, Michael A. Peshkin, Ken Goldberg
Proceedings of the IEEE 1993 International Conference on Robotics and Automation, Atlanta, GAComplete parameter identification of a robot from partial pose information
Ambarish Goswami, Arthur Quaid, Michael A. Peshkin
Proceedings of the IEEE 1993 International Conference on Robotics and Automation, Atlanta, GAThe robustness of an admittance control law designed for force guided assembly to the disturbance of contact friction
Joseph M. Schimmels, Michael A. Peshkin
Proceedings of the IEEE 1992 International Conference on Robotics and Automation, Nice, FranceCalibration and parameter identification of a 6DOF robot using a single radial distance transducer (invited)
Ambarish Goswami, Arthur Quaid, Michael A. Peshkin
Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics, Chicago 1992An integrated CT/CAD/robotic system for total knee replacement surgery (invited)
homas C. Kienzle III, S. David Stulberg, Chi-Haur Wu, Michael A. Peshkin, Arthur Quaid
Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics, Chicago 1992
also in Proceedings of the IEEE 1993 International Conference on Robotics and Automation, Atlanta, GAImplementation of passive force control with redundant manipulators
Ambarish Goswami, Michael A. Peshkin
Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics, Charlottesville 1991Force-assemblability: insertion of a workpiece into a fixture guided by contact forces alone
Joseph M. Schimmels, Michael A. Peshkin
Proceedings of the IEEE 1991 International Conference on Robotics and Automation, Sacramento CAA task-space formulation of passive force control (invited)
Ambarish Goswami, Michael A. Peshkin
Proceedings of the 6th International Symposium on Intelligent Control, Arlington VA, 1991Synthesis and validation of non-diagonal accommodation matrices for error-corrective assembly
Joseph M. Schimmels and Michael A. Peshkin
Proceedings of the IEEE 1990 International Conference on Robotics and Automation, Cincinnati, OHPassive robotics: an exploration of mechanical computation (invited)
Ambarish Goswami, Michael A. Peshkin, James Edward Colgate
Proceedings of the American Control Conference, 1990, Santa Barbara
also in Proceedings of the IEEE 1990 International Conference on Robotics and Automation, Cincinnati, OHProgramming a damping matrix for error-corrective assembly
Michael A. Peshkin
Proceedings of the ASME 1989 Conference on flexible assembly systems, Montreal
also in Proceedings of the 4th International Symp. on Intelligent Control, Albany, NY, 1989Programmed compliance for error correction during robotic assembly (invited)
Michael A. Peshkin
Proceedings of the 3rd International Symp. on Intelligent Control, Arlington, VA, 1988Minimization of energy in quasistatic manipulation
Michael A. Peshkin and Arthur C. Sanderson
Proceedings of the IEEE 1988 International Conference on Robotics and Automation, Philadelphia , PAPlanning robotic manipulation strategies for sliding objects
Michael A. Peshkin and Arthur C. Sanderson
Proceedings of the IEEE 1987 International Conference on Robotics and Automation, Raleigh, NCPlanning sensorless robot manipulation of sliding objects
Michael A. Peshkin and Arthur C. Sanderson
Proceedings of AAAI-86, Philadelphia, PAManipulation of a sliding object
Michael A. Peshkin and Arthur C. Sanderson
Proceedings of the IEEE 1986 International Conference on Robotics and Automation, San Francisco, CAA Variational Principle for Quasistatic Mechanics
Michael A. Peshkin and A.C. Sanderson
tech. report CMU-RI-TR-86-16, Robotics Institute, Carnegie Mellon University, December, 1986.The Motion of a Pushed, Sliding Object, Part1: Sliding Friction
Michael A. Peshkin and A.C. Sanderson
tech. report CMU-RI-TR-85-18, Robotics Institute, Carnegie Mellon University, September, 1985.The Motion of a Pushed, Sliding Object, Part 2: Contact Friction
Michael A. Peshkin and A.C. Sanderson
tech. report CMU-RI-TR-86-07, Robotics Institute, Carnegie Mellon University, April, 1986.Reachable Grasps on a Polygon: The Convex Rope Algorithm
Michael A. Peshkin and A.C. Sanderson
tech. report CMU-RI-TR-85-06, Robotics Institute, Carnegie Mellon University, April, 1985.A Modeless Convex Hull Algorithm for Simple Polygons
Michael A. Peshkin and A.C. Sanderson
tech. report CMU-RI-TR-85-08, Robotics Institute, Carnegie Mellon University, May, 1984.
US 11,886,641 Method and apparatus for finger position tracking and haptic display using conductive islands.
US 11,500,487 Haptic device with indirect haptic feedback
US 11,442,546 Method and apparatus for finger position tracking and haptic display using conductive islands
US 10,768,749 Electronic controller haptic display with simultaneous sensing and actuation
US 10,739,853 Method and apparatus for finger position tracking and haptic display using conductive islands
US 10,705,610 Apparatus for unified audio tactile feedback
US 10,620,769 Haptic device with indirect haptic feedback
US 10,564,790 Haptic device with indirect haptic feedback
US 10,423,228 Haptic touch screen and method of operating the same
US 10,379,655 Touch interface device having an electrostatic multitouch surface and method for controlling the device
US 10,379,616 Haptic display with simultaneous sensing and actuation
US 10,369,028 Safety overload for direct skeletal attachment
US 10,331,285 Haptic device with indirect haptic feedback
US 10,120,447 Haptic display with simultaneous sensing and actuation
US 10,108,288 Touch interface device and method for applying controllable shear forces to a human appendage
US 10,048,823 Haptic device with indirect haptic feedback
US 10,007,341 Touch interface device and method for applying lateral forces on a human appendage
US 9,804,724 Haptic device with indirect haptic feedback
US 9,811,194 Touch interface device and methods for applying controllable shear forces to a human appendage
US 9,597,217 Cable driven joint actuator and method
US 9,600,115 Haptic device with controlled traction forces
US 9,122,325 Touch interface device and method for applying controllable shear forces to a human appendage
US 9,110,533 Haptic device with controlled traction forces
US 9,104,285 Haptic device with indirect haptic feedback
US 8,836,664 Haptic device with indirect haptic feedback
US 8,525,778 Haptic device with controlled traction forces
US 8,470,051 One motor finger mechanism
US 8,780,053 Vibrating surface for haptic interface
US 8,791,902 Vibrating surface for haptic interface
US 8,405,618 Haptic device with indirect haptic feedback
US 8,251,863 Continuously variable transmission with multiple outputs
US 7,803,125 Walking and balance exercise device
US 7,731,670 Controller for an assistive exoskeleton based on active impedance
US 7,544,172 Walking and balance exercise device
US 7,185,774 Methods and apparatus for manipulation of heavy payloads with intelligent assist devices
US 7,120,508 System and architecture for providing a modular intelligent assist system
US 7,047,826 Force sensors
US 6,928,336 System and architecture for providing a modular intelligent assist system
US 6,907,317 Hub for a modular intelligent assist system
US 6,868,746 Method and apparatus for force sensor
US 6,813,542 Modules for use in an integrated intelligent assist system
US 6,769,280 Real-time draw-in sensors and methods of fabrication
US 6,738,691 Control handle for intelligent assist devices
US 6,668,668 Non-contacting sensors
US 6,241,462 Method and apparatus for a high-performance hoist
US 6,198,794 Apparatus and method for planning a stereotactic surgical procedure using coordinated fluoroscopy
US 6,069,932 Apparatus and method for planning a stereotactic surgical procedure using coordinated fluoroscopy
US 5,952,796 Cobots
US 5,923,139 Passive robotic constraint devices using non-holonomic transmission elements
US 5,799,055 Apparatus and method for planning a stereotactic surgical procedure using coordinated fluoroscopy
WO2010/025522 An apparatus for use in breaking down an animal carcass