Automation has made deep inroads into select parts of assembly plants over the last 25 years. A typical automobile final assembly plant uses several hundred robots to build and paint the auto frame. In sharp contrast, human labor is the prime mover in the third and final phase of assembly, General Assembly (GA), where sub-systems such as the instrument panel, transmission and doors are married with the unibody frame. An examination of tasks executed in the GA area shows that, in contrast to tasks in the body and paint shops, sensory inputs such as touch and vision play a critical role in performing tasks reliably. Robotic technology has not developed to the point where electro-mechanical systems can perform these tasks reliably enough for use on the floor. The operators, consequently, remain critical contributors to the assembly process and product quality. This article briefly addresses the development of a new type of tooling that combines the capabilities of the line operator and of robotic technology for performing assembly tasks in a safe and timely manner.
Cobots are a new type of robotic device intended for direct collaboration with a human operator in a shared workspace, such as that of an assembly line. Cobots were developed by Northwestern University and General Motors Corporation to address two main issues:
1. Ergonomics:
- Cobots are powered by a human operator; they cannot move on their own. They provide virtual guiding surfaces that act as a "funnel" directing motion toward the appropriate task location. As the operator needs to concentrate less on guiding the assist tool, (s)he fatigues more slowly.
- The virtual guiding surfaces are programmed surfaces in space and time. By planning the surfaces appropriately (e.g., by blending one into another), cobots obviate the need for the operator to push and pull on the large sub-systems. This improved inertia management leads to smaller operator applied forces and better ergonomics.
2. Safety:
- The proximity of the human and the cobot necessitates designing-in safety. The intrinsic passivity of the cobot provides this; the maximum energy in the system is limited by the human's capability.
An assembly assist tool is made up of a guidance unit (the cobot) as well as conventional task dependent tooling (e.g., a door loader). The cobot above, which can enforce paths in three dimensions (x, y, and q {theta}), consists of three free-rolling wheels in contact with a working surface. While the rolling velocity of the wheels is monitored by an encoder (but not driven by a motor), the attitude (i.e., the steering angle) of the wheels is controlled in response to the forces that the operator applies to push the cobot in a desired direction.
The cobot operates in one of two modes: virtual caster and virtual wall. The virtual caster mode is invoked when the cobot is away from all defined constraint surfaces. In this mode, the cobot permits any motion that the operator attempts to impart by servo-controlling the wheels such that user forces perpendicular to the wheel's rolling direction are nulled. Virtual wall mode is invoked when the user brings the cobot into contact with the constraint surface. The cobot wheels are controlled to roll tangential to the constraint surface. Control switches back to the caster mode when contact is lost with the constraint surface.
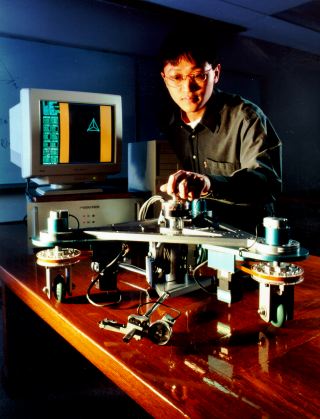
The first assist-device prototype (Figure 1 depicts only the cobot part of the device) is to be tested in GM's labs on a real plant problem later this year. The principal goals are to understand how human operators relate to and interact with cobots and to identify assembly line specific issues that will direct future efforts in cobotics.
Our work is also innovative from an organizational perspective. Rather than the traditional technology push scenario, where the goal is to transfer university solutions to industry, this work has been driven by problems identified on the assembly line by the end user. Close interactions among the line workers, plant personnel, management, and research engineers has guided the invention and evolution of cobots. The benefits of this collaboration are many. The university benefits from access to real world problems that are theoretically rich, the line operator from ergonomically superior tools, and the manufacturing system from the quick reconfigurability of cobots.
We believe that cobots are the first of a new generation of computer controlled and programmable assembly-assist tools that alleviate ergonomic concerns while simultaneously providing the capability to build a lean and flexible general assembly line. As cobots evolve into practical systems and are deployed on the line, the functionality that they offer is bound to impact the architectures of future assembly lines.