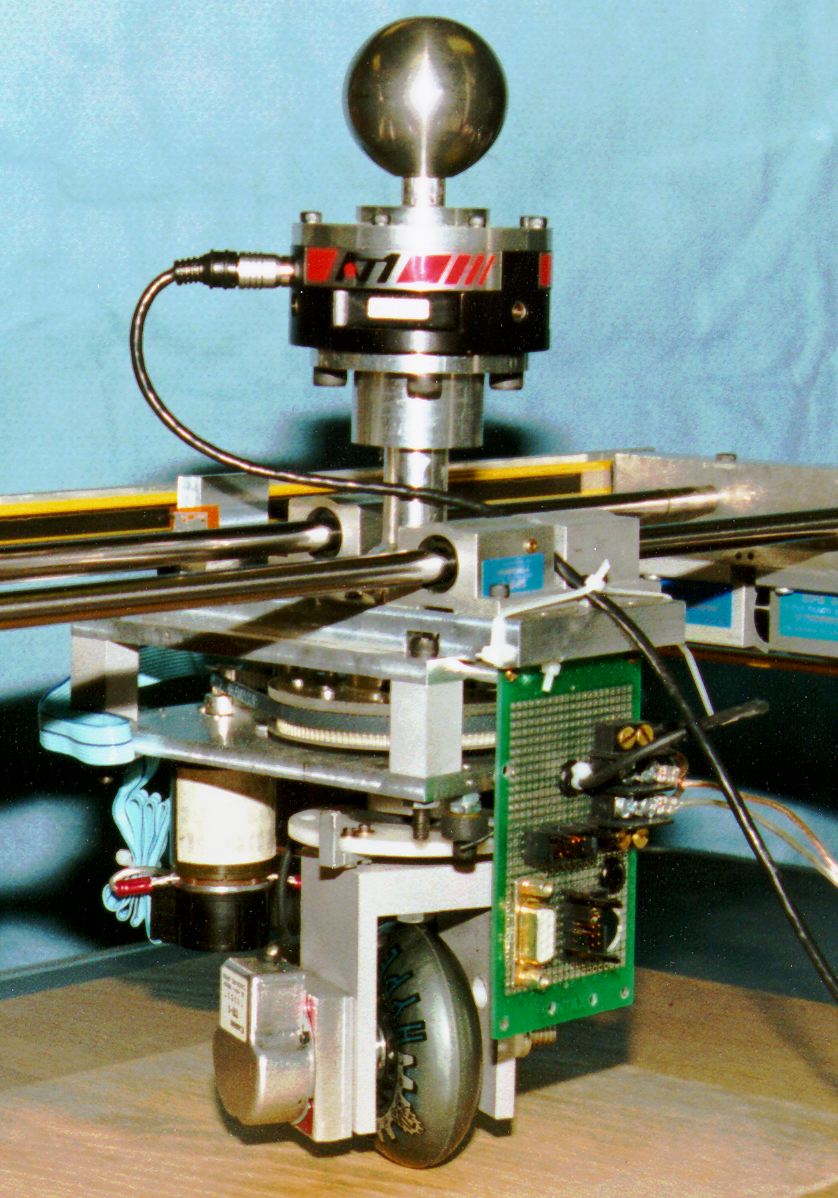
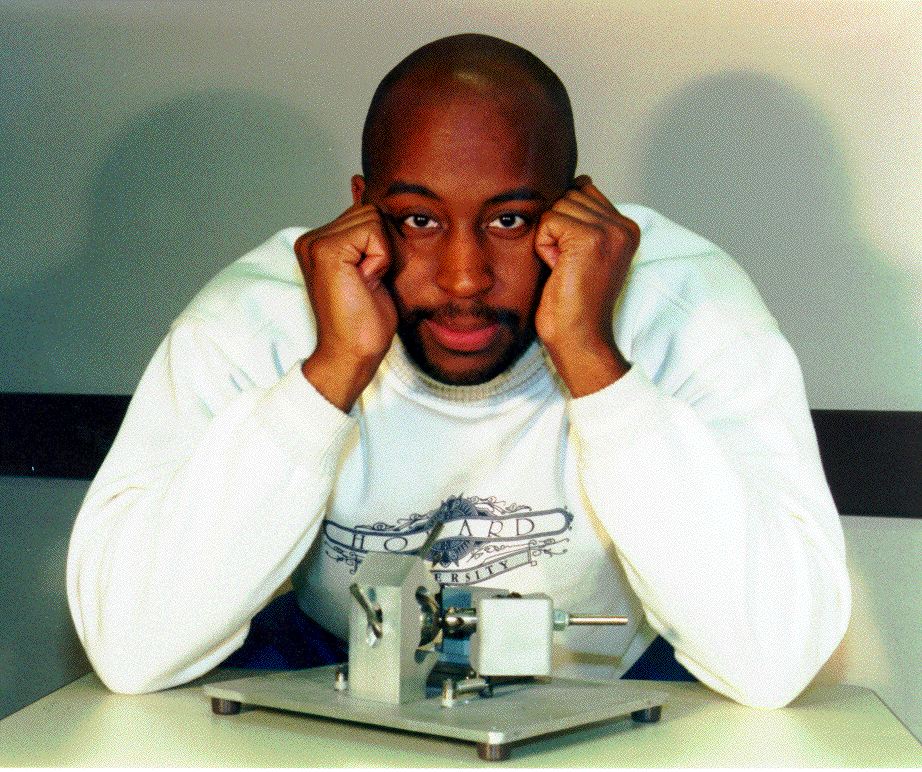
"Unicycle" cobot, the simplest possible architecture. It consists of a single wheel steered by a motor. Despite its simplicity, the unicycle cobot is able to demonstrate the two essential control modes: "free" mode in which the wheel is steered such as to transparently comply with the user's desired direction of motion, and "virtual surface" mode in which the wheel is steered such as to confine the user's motion to a software-defined guiding surface.
Also available as large jpeg or large gif




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}